根据程序设定,机器人在平面上能完成下列动作:先从原点 $O$ 沿正东偏北 $\alpha $ $\left( {0 \leqslant \alpha \leqslant \dfrac{\mathrm \pi }{2}} \right)$ 方向行走一段时间后,再向正北方向行走一段时间,但 $\alpha $ 的大小以及何时改变方向不定(如下图).假定机器人行走速度为 $ 10 $ 米/分钟,设机器人行走 $ 2 $ 分钟时的可能落点区域为 $S$,则 $S$ 的面积(单位:平方米)等于 \((\qquad)\) 
【难度】
【出处】
无
【标注】
【答案】
B
【解析】
假设机器人沿正东偏北 $\alpha$ 方向和沿正北方向行走的路程分别为 $t$ 米和 $20-t$ 米,则机器人的最终落点坐标为 $(t\cos \alpha ,t\sin \alpha +20-t)$,$0\leqslant t\leqslant 20$.
即当 $\alpha$ 固定时,机器人落点轨迹可以用关于 $t$ 的参数方程$$\begin{cases}x=t\cos \alpha\\ y=t\sin \alpha +20-t\end{cases}, 0\leqslant t\leqslant 20$$表示.化简得$$y=\dfrac{\sin \alpha -1}{\cos \alpha}x+20, 0\leqslant x\leqslant 20 \cos \alpha\cdots {\text{ ① }}.$$如图,弧 $AB$ 为圆 $x^2+y^2=20^2$ 在第一象限及 $x$、$y$ 正半轴的部分,$M$ 在弧 $AB$ 上,$M$ 在 $x$ 轴上的投影为 $M_1$.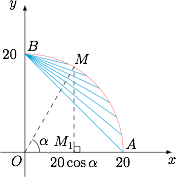 设 $\angle{xOM}=\alpha$,则$$\dfrac{\sin \alpha -1}{\cos \alpha}=k_{BM},$$于是 ① 中的方程 $y=\dfrac{\sin{\alpha}-1}{\cos \alpha}x+20$ 即直线 $BM$.
设 $\angle{xOM}=\alpha$,则$$\dfrac{\sin \alpha -1}{\cos \alpha}=k_{BM},$$于是 ① 中的方程 $y=\dfrac{\sin{\alpha}-1}{\cos \alpha}x+20$ 即直线 $BM$.
考虑到自变量 $x$ 的取值被限定在 $[0,20\cos \alpha]$,而 $OM_1=20\cos \alpha$,于是 ① 中所表示的轨迹就是线段 $BM$.
接下来考虑 $\alpha$ 在 $\left[0,\dfrac{\pi}{2}\right]$ 的变化,随着 $\alpha$ 的变化,$M$ 在弧 $AB$ 上运动,从而线段 $BM$ 划过的区域即弓形 $ABM$,其面积为$$\dfrac{\pi \cdot 20^2-(20\sqrt 2)^2}{4}=100\pi -200.$$
即当 $\alpha$ 固定时,机器人落点轨迹可以用关于 $t$ 的参数方程$$\begin{cases}x=t\cos \alpha\\ y=t\sin \alpha +20-t\end{cases}, 0\leqslant t\leqslant 20$$表示.化简得$$y=\dfrac{\sin \alpha -1}{\cos \alpha}x+20, 0\leqslant x\leqslant 20 \cos \alpha\cdots {\text{ ① }}.$$如图,弧 $AB$ 为圆 $x^2+y^2=20^2$ 在第一象限及 $x$、$y$ 正半轴的部分,$M$ 在弧 $AB$ 上,$M$ 在 $x$ 轴上的投影为 $M_1$.
设 $\angle{xOM}=\alpha$,则$$\dfrac{\sin \alpha -1}{\cos \alpha}=k_{BM},$$于是 ① 中的方程 $y=\dfrac{\sin{\alpha}-1}{\cos \alpha}x+20$ 即直线 $BM$.考虑到自变量 $x$ 的取值被限定在 $[0,20\cos \alpha]$,而 $OM_1=20\cos \alpha$,于是 ① 中所表示的轨迹就是线段 $BM$.
接下来考虑 $\alpha$ 在 $\left[0,\dfrac{\pi}{2}\right]$ 的变化,随着 $\alpha$ 的变化,$M$ 在弧 $AB$ 上运动,从而线段 $BM$ 划过的区域即弓形 $ABM$,其面积为$$\dfrac{\pi \cdot 20^2-(20\sqrt 2)^2}{4}=100\pi -200.$$
题目
答案
解析
备注
